
|
|
|
Главная » Дистанционное управление моделями 1 ... 7 8 9 10 11 12 13 ... 28 Мы изготовляем После проверки на экспериментальной плате печатную плату датчик канальных импульсов и переключающий усилитель должны быть смонтированы окончательно на их постоянных платах. Монтаж здесь будет очень плотным, и потому от технологии изготовления платы путем срезания фольги в этом случае придется отказаться, применив другой способ изготовления плат. Печатные платы получили свое название потому, что при фабричном производстве они изготовляются способом печатания. Мы будем изготовлять их по соответствующим образцам, которые приводятся в данной книге; поэтому все платы изображены здесь в масштабе 1:1. Преимущество подобной техники построения схем заключается прежде всего в наглядности и экономичности монтажа. Для изготовления той или иной печатной схемы (схемы, собранной на печатной штате) в книге каждый раз приводятся два чертежа. Схема разводки проводов показана в виде рисунка, нанесенного на покрытую медной фольгой (нижнюю) сторону платы. Навеска монтажных элементов на другой (верхней) стороне платы производится по схеме расположения элементе. Все монтажные элементы на этой схеме изображены так, как они видны сверху. Наложим плотно на тщательно очищенную от окислов медную фольгу (нижнюю сторону платы) схему разводки проводов и продавим в соответствии с ней чертилкой все центры для сверления отверстий, так чтобы они оттиснулись на фольге. Обведем все выдавленные точки (места будущей пайки) кружками. диаметром 2,5-3 мм, а затем, используя как образец схему разводки проводов, на покрытой медью стороне платы с помощью чертежной трубочки нарисуем разбавленным нитролаком все токопроводы. Когда чертеж будет готов, проверим его еще раз, точка за точкой, провод за проводом на соответствие оригиналу. При этом надо строго следить, во-первых, за тем, чтобы между разделенными друг от друга проводами или точками пайки сохранялось расстояние не менее 0,5 мм (чрезмерно близкое взаимное расположение проводов грозит опасностью образования перемычек во время пайки), и, во-вторых, за тем, чтобы в процессе лакировки не коснуться пальцами очищенной медной поверхности. Жирные отпечатки пальцев могут оказаться в дальнейшем причиной некачественного травления и плохой пайки. Места, не покрытые лаком, должны быть вытравлены. Травильную жидкость приготовим сами, для чего растворим в воде хлорид железа (50 г РеОз в 100 см воды). Этот раствор следует хранить в снабженном соответствующей этикеткой пластиковом флаконе. При многократном употреблении жидкости время травления увеличивается, поэтому по прошествии некоторого срока раствор придется составлять заново. Для травления нальем раствор в фотокювету (или в другую подходящук посуду) и погрузим в него плату (медным слоем кверху). Подогрер и покачивание ванночки ускоряют процесс травления, который мы должны контролировать до конца (в течение примерно 5 мин). Прекращать процесс травления следует, когда не покрытая лаком медь полностью растворится. Затем печатную плату тщательно промоем ь воде и удалим лаковый слой нитроразбавителем. Далее просверлим все точки пайки (с покрытой медью стороны) сверлом ф 0,8-1,0 мм. Все остальные сверле Печатная плата  Рис. 79. Изгибание выводов резисторов и цельностекпянных диодов. шя и пробои выполним в соответствии с чертежом. Для предохранения очищенной меди от окисления (с целью обеспечить возможность последующей пайки) ее покрывают каким-либо флюсом, который ни в коем случае не должен обладать травильными свойствами. Jljme всего для этой цели подходит паяльный лак (канифоль, растворенная в спирту до насыщения), который мы должны приготовить сами. Для выполнения паяльных работ нам вполне достаточно 20-ваттного паяльника с заточенным в виде пирамиды и хорошо зачищенным жалом. Нагрев паяльника должен быть таким, чтобы олово свободно стекало с жала, в противном случае возможно появление не-пропаянных мест - неисправность,.которую не сразу обнаружишь. Полупроводниковые элементы и электролитические конденсаторы чувствительны к теплу, поэтому следует избегать их перегрева при пайке. 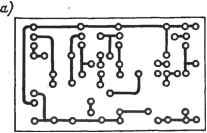 Рис. 80. Печатная плата (а) и схема расположения элементов {б) датчика канальных импульсов. 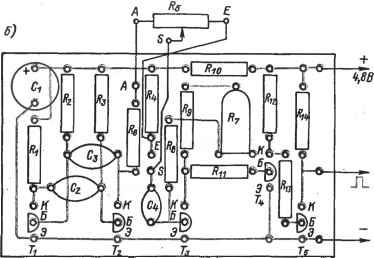 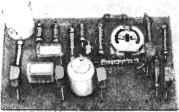  1.0 \ J /2.2 2.8 ms Рис. 81. Монтаж датчика канальных импульсов. Рис. 82. Прибор для проверки сервосистемы. Длительная пайка в одном месте может привести также к отделению то-копроводящего слоя от подложки. В заключение дадим еще один совет. Выводы съемных элементов следует сгибать не непосредственно на их корпусе, а, как показано на рис. 79, отступя по меньшей мере на расстояние а = 3 мм, причем радиус изгиба R должен быть не менее 1,5 мм. В противном cnjae возникает опасность повредить корпус (особенно стеклянный) или отломать вывод. Таким образом, мы познакомились с необходимыми правилами и приемами изготовления печатных схем. Все схемы устройств дистан- Рис. 83. Печатная плата (а) и схема расположения элементов (б) переключающего усилителя. 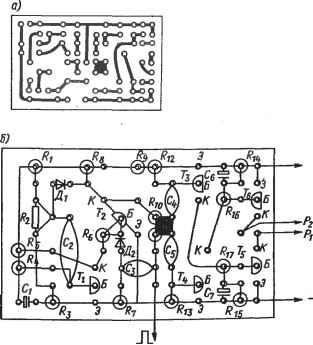 Импульсный Вход  Рис. 84. Монтаж переключающего усилителя. Рис. 85. Размещение переключающего усилителя в корпусе. / - кабель; 2 - губчатая резина; 3 - реле; 4. - переключающий усилитель; 5 - съемная крышка. Размеры корпуса при. толщине материала 2 мм - 54x34x44 мм. 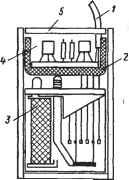 ционного управления и вспомогательных приборов предполагается выполнять по той же самой технологии, поэтому дальше на этом вопросе мы детально останавливаться не будем. Первой печатной схемой, которую мы изготовим описанным выше способом, является схема на плате датчика канальных импульсов (рис. 80, а). Прежде всего просверлим в плате необходимые отверстия и обработаем их канифолью, а затем элемент за элементом в полном соответствии с принципиальной схемой (см. рис. 73) и схемой расположения элементов (рис. 80, б) bjsiA переносить на печатную плату и припаивать все детали. Закадчив пайку, аккуратно обрежем выступающие концы соединительных проводов с тем, чтобы они были не длиннее I мм. После этого проконтролируем еще раз все места паек на чистоту исполнения и отсутствие перемьмек (разлившееся олово) между точками пайки или токопроводами. Образец готового, датчика канальных импульсов представлен на рте. 81. На снимке хорошо видно размещение и взаимное расположение всех деталей схемы. Полностью укомплектованную печатную плату подвергнем первым испытаниям на работоспособность с помощью собранного пока еще на экспериментальной плате переключающего усилителя. Подключив батарею, проконтролируем потребляемый ток. Отклонение тока от номинального значения может стать отправной точкой для отыскания вероятных неисправностей. Если окажется, что датчик канальных импульсов работает удовлетворительно, изготовим для него корпус и получим таким образом прибор для проверки сервосистемы (рис. 82). Прибор снабжен штекером для подключения батареи (2x2,4 В) и ко-лодаой для присоединения сервосистемы. Провод +2,4 В подведем от штекера прямо к колодке, поскольку на работу самого прибора она влияния не оказывает, а будет необходима лишь при проверке сервосистемы . Для установки прибора на длительность импульсов от 1,0 до 2,2 мс и градуировки шкалы промежуточных значений на верхней стенке корпуса воспользуемся отлаженной сервосистемой какого-либо другого устройства или, еще лучше, откалиброванным осциллографом. Подобным же образом изготовим печатную плату для переключающего усилителя (рис. 83, а). На этой плате детали размещены значительно плотнее, чем на плате датчика канальных импульсов (рис. 83,6), поэтому ее изготовление послужит хорошей школой для работы над последующими приборами, где монтаж еще более плотный. Обернув переключающий усилитель (рис. 84) губчатой резиной, разместим его вместе с обоими реле в общий миниатюрный корпус (рис. 85), изготовляемый из полистирола толщиной 2 мм. Габаритные размеры корпуса определяются в первую очередь размерами реле и могут поэтому заметно отличаться от приведенных в подписи к рис. 85. Теперь мы можем уже приступать и к первым опытам с дистанционным управлением моделями, ограничившись поначалу кабельным каналом управления. Наша первая модель Первой нашей моделью мог &>i стать любой с дистанционнь1м сухопутный самоходный экипаж (грузовик, ммоходтятележка легковая махнина, специальный автомобиль). Однако, учитывая, что модель должна служить нам только для опробования системы дистанционного управления и накопления первоначальных навыков в работе с нею, от исполнительных механизмов сложных конструкций пока воздержимся и остановим свой выбор на гусеничной тележке (рис. 86). Эту тележку можно сделать самим или купить ее в игрушечном магазине и переделать, приспособив для наших целей. Переделка модели сводится к размещению в ней исполнительных механизмов (переключающих усилителей и двигателей с ходо- -выми батареями). Эту же модель  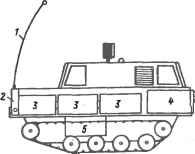 Рис. 86. Так выглядит наша первая модель. Рис. 87. Расположение переключающего усилителя и ходовых батарей на модели. 1 - антенна; 2 - антенная колодка; 3 - ходовая батарея; 4 - переключающий усилитель (приемное устройство); 5 - ходовой двигатель. 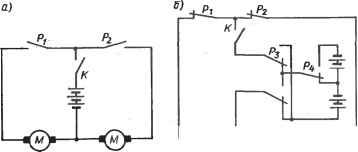 Рйс. 88. Схема ходового двигателя: а - дня изменения направления движения; б - для изменения направления и скорости движения. К - выключатель или выключающий контакт антенной колодки; реле Pi - дня поворота вправо; реле Р2 - для поворота влево; реле Рз - дня движения вперед или назад; реле Р4 - для медленного или быстрого движения. можно приспособить и к беспроволочному дистанционному управлению, предусмотрев в ней место для размещения в дальнешпем приемного блока системы. Итак, смонтируем оба переключающихусилителяв1гележке (рис. 87) и будем поначалу передавать управляющие команды ( Вправо , Прямо , Влево ) по проводам. Модель с таким кабельным дистанционным управлением может ездить по комнате, повинуясь наишм командам. Путем соответствующего включения и выключения двух ходовых двигателей мы можем заставить модель поворачивать в желаемом направлении. Поэтому прежде всего перестроим передачу тележки под двухмоторный привод (рис. 88, д). Оба ходовых двигателя должны управляться независимо друг от друга. Через тумблер К они подключаются к электрической батарее; ток протекает через размыкающие контакты обоих реле. В cnje если задействован один из каналов, срабатывает соответствующее реле, после чего вращается только один из двигателей. Например, если останавливается правый двигатель, модель делает разворот вправо. Для опытов с дистанционным управлением нам понадобятся два источника напряжения:.один - для питания датчика команд и переключающих усилителей в модели, второй - для привода. Соединение датчика команд с моделью осуществляется трехпроводным кабелем (плюсовой, импульсный и общий провода) . После проведения первых ходовых испытаний у нас, как правило, появляется желание расширить функции системы управления (например, заставить ее выполнять команды Вперед , Стоп , Назад ). Для реализации этих функций необходимы второй датчик канальных импульсов и еще один переключающий усилитель (в дальнейшем этот второй переключающий усилитель найдет себе применение и в других схемах). Монтаж и все элементные соединения в модели следует выполнять в : ответст-вии со схемой, представленной на рис. 88, б. Но вот мы все отрегулировали, все наладили, и наша кабельная система дистанционного управления работает безукоризненно. Однако с течением времени нам надоест водить машину на поводке . Мы захотим выпустить модель на простор: пусть движется, не связанная с нами кабелем, но покорная передаваемым командам. Поэтому следующие наши эксперименты будут нацелены на передачу команд без проводов, с помощью радио. 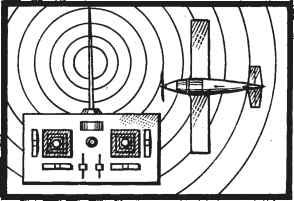 ГЛАВА БЕСПРОВОЛОЧНОЕ ДИСТАНЦИОННОЕ УПРАВЛЕНИЕ Мы знакомимся с высокой частотой В первых опытах дистанционное управление моделью осуществлялось по кабелю. Теперь нам предстоит отказаться от него, применив беспроволочную передачу управляющих команд на модель. Для передачи сигналов на расстояние более 10 м удовлетворительных результатов любитель может достичь, только используя электромагнитные поля высокочастотного диапазона. Поэтому для передачи сигналов будем применять электромагнитные высокочастотные колебания (ВЧ-колебания). ВЧ-колебания, несущие в себе сигнал, будем получать от передатчика системы дистанционного управления и излучать их в пространство с гомощью антенны (рис. 89). Дойдя до модели, они принимаются антенной приемника, усиливаются и поступают на переключающее устройство. Переключающее устройство преобразует содержащуюся в сигнале командную информацию в соответствующий процесс управления (например, рулевой машинкой или режимом двигателя) , Спектр частот электромагнитных волн чрезвычайно широк. Все они независимо от частоты имеют одинаковую скорость распространения, равную примерно 300 ООО км/с (скорость света). Между 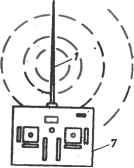  Рис. 89. К пояснению принципа дистанционного управления моделью. ] - антенна передатчика; 2 - антенна приемника, 3 - аккумулятор; 4 двигатель; 5 - приемник; 6 - рулевая машинка; 7 - передатчик. скоростью распространения г, частотой / и длиной волны Л существует зависимость Элекгромшнитные волны интересующего нас диапазона излучаются и принимаются, как сказано выше, антеннами. Особенно эффективно работают антенны, длина которых составляет около четверти длины волны, 1. е. /а„.,. =Л/4. Таким образом, для излучения колебаний звуковой частоты 3 кГц потребовалась бы антенна длиной 3- 10 м- с 4- 3 10 с 10 м = 25 км. Нетрудно видеть, что задача эта практически неразрешима, и сигналы придется передавать на другой, более высокой частоте, позволяющей использовать более компактную антенну. Из трех отведенных для любителей частотных диапазонов выберем диапазон со средней частотой 27,12 МГц. Эта частота и станет несущей частотой нашего сигнала. Длина антенны для нее составит примерно 3- 10* м- с 4- 27,12- 10* с = 2,75 м. Это уже вполне приемлемая для наших целей длина антенны. Теперь нужно подумать о том, как создать электромагнитные колебания частотой 27,12 МГц и промодулировать их частотой сигнала. Мы строим Все устройства для создания колебании назы- высокочастотный ваются генераторами. Мы уже знакомы с им- генератор пуЛьсным генератором. Генератор ВЧ-колеба- ний будем в дальнейшем называть ВЧ-генера-тором (или просто генератором). Обратимся еще раз к схеме импульсного генератора (см. рис. 61, с). Мы можем регулировать его частоту путем изменения емкостей конденсаторов связи Ci и Сг и сопротивлений резисторов в базовых цепях транзисторов. Уменьшая постепенно значения этих параметров, мы придем к такой частоте, при которой колебания сорвутся. Объясняется это тем, что с ростом частоты коэффициент усиления транзистора постепенно уменьшается до тех пор, пока не окажется, что схема не в состоянии больше возбуждаться. Параметром, характеризующим зависимость коэффициента усиления транзистора от частоты, является граничная частота.- Под граничной частотой понимают такую, при которой коэффициент усиления по току в схеме с общим эмиттером (ОЭ) снизится до значения 1. У германиевых транзисторов граничная частота относительно невелика (до 100 кГц, в исключительных слзгчаях до 500 кГц). По этой причине их нельзя применять в изготовляемых нами устройствах дистанционного управления, которые должны работать на частотах до 30 МГц. Дня высокочастотных устройств и быстродействующих ключей бьши разработаны кремниевые транзисторы, граничные частоты которых достигают необходимых для целей дистанционного управления пределов. Попробуем определить граничную частоту опытным путем. Предварительно выскажем еще несколько замечаний. Для любителей имеются в продаже недорогие некондиционные транзисторы с большим разбросом параметров. Исследуя свойства транзисторов на частоте 27,12 МГц (рабочая частота наших устройств дистанционного управления), мы сможем рассортировать их на две группы. Те, что надежно сохраняют усилительные свойства на частоте 27,12 МГц, будем применять для изготовления ВЧ-генератора, оконечных каскадов передатчика, входных каскадов приемника и каскадов усилителя промежуточной частоты. Остальные пойдут на изготовление усилителей низкой частоты (НЧ), импульсных схем и усилителей выпрямленного напряжения в цепях питания. Для экспериментальных исследований воспользуемся схемой генератора синусоидальных колебаний с частотой 27,12 МГц (рис. 90), который может й>1ть применен и в приборах дистанционного управления. Внимательно рассмотрев схему, мы увидим знакомые уже нам элементы. Резисторы Ri и /?2 образуют для транзистора делитель напряжения, определяющий положение рабочей точки. Резистор R3 стабилизирует Это положение. По высокой частоте резистор R3 зашунтирован конденсатором С3, предназначенным для того, чтобы возникающее напряжение ВЧ-колебаний целиком падало на нагрузочном сопротивлении (на контуре LiC). Расчеты показывают, что на частоте/ = 27,12 МГц реактивное сопротивление конденсатора С3 составляет всего v = j 277/Сз 2-3,14-27,12-10-4,7-10-А-с-
|
 Как выбрать диван  История мебели  Стили кухонной мебели  Публикации  Инверторы  Приемники |






