
|
|
|
Главная » Теория управления 1 2 3 4 5 6 ... 31 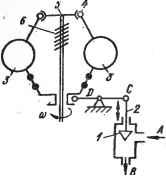 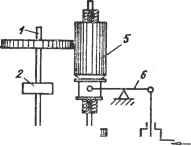 Рис. 1.9. Регулирование по отклонению Рис. 1.10. Регулирование по возмущению регулирована так, чтобы положение клапана / обеспечивало тре-f .ую подачу топлива к двигателю. Если частота вращения превысит заданную, то под влиянием центробежной силы грузики 3 расходятся, конец рычага D поднимается, а конец С - опускается. Клапан 1 займет новое положение, при котором подача топлива к двигателю уменьшится и частота вращения вала РМ примет вновь заданное значение. Рассуждая аналогично, можно убедиться в том, что при уменьшении частоты вращения со, по сравнению с заданной, клапан переместится в направлении, обеспечивающем увеличение подачи топлива к двигателю и восстановление частоты вращения. Нетрудно убедиться в том, что .система регулирования скорости вращения электродвигателя рассмотренная в предыдущем параграфе (см. рис. 1.7, б) является системой регулирования по принципу отклонения регулируемой величины от заданного значения. В этой системе значение регулируемой величины - частоты вращения со вала рабочей машины РМ--задается положением ползунка п потенциометра R. При отклонении и от заданного значения изменяется напряжение тахогенератора тг, и в системе формируется управляющее воздействие, направленное на приведение регулируемой величины со к заданному значению. Достоинством систем регулирования по отклонению является то, что в них обеспечивается учет всех возмущений, действующих на любой элемент системы, так как управляющее воздействие формируется в зависимости от конечного результата управления - значения регулируемой величины. Недостатком регулирования по отклонению является снижение быстродействия системы, выражающееся в замедлении реакции регулятора на изменение регулируемой величины. Действительно, при регулировании по отклонению регулируемой величины компенсация влияния любого возмущения, независимо от места его приложения в системе, начинается лишь после того, как это воздействие преобразовалось элементами системы в изменение регулируемой величины. Отмеченный недостаток устраняется в системах управления по принципу компенсации возмущения - управления по возмущению. При управлении по возмущению в системе измеряется возмущающее воздействие (нагрузка) и результат измерения преобразуется в управляющее воздействие. Реализацию принципа регулирования по возмущению рассмотрим на примере кинематической схемы регулятора, представленного на рис. 1.10. В этой схеме вал двигателя 1 и вал рабочей машины 3 связаны между собой упругим элементом 2. Вращение валов 1 и 3 передается валу 4, верхняя часть которого имеет червячную передачу. Муфта 5 наряду с вращательным движением может осуществлять возвратно-поступательное движение вдоль линии вала 4, которое с помощью рычага 6 передается в устройство регулирования подачи топлива, описанного выше (см. рис. 1.9). Из рис. 1.10 видно, что при изменении нагрузки на валу РМ произойдет относительное смещение сечений валов 1 и 3, смещение муфты 5 вдоль линии вала 4 и соответствующее изменение подачи энергии к двигателю: при снижении нагрузки подача энергии уменьшится, а при повышении - увеличится. Сложность измерения возмущения (нагрузки) - один из недостатков систем регулирования по возмущению. Однако в ряде технических устройств часто бывает нетрудно выделить и использовать с целью регулирования некоторую физическую величину, связанную определенным законом (например, пропорциональную) с возмущением. Примером таких устройств служит генератор постоянного тока со смешанным возбуждением, у которого последовательная (токовая) обмотка может быть использована для формирования управляющего воздействия, зависимого от нагрузки - тока якоря генератора. Достоинством систем регулирования по возмущению является их более высокое быстродействие, так как система реагирует на изменение возмущения до того, как эти изменения элементами системы преобразуются в изменения регулируемой величины. Существенным недостатком регулирования по возмущению является нечувствительность систем ко всем возмущениям, кроме того, на которое настроен регулятор. В связи с этим в практике управления широко используется принцип комбинированного управления, когда для формирования управляющего воздействия используются как изменения возмущения, так и изменения регулируемой величины, Примером системы комбинированного управления может служить рассмотренная выше схема (рис. 1.7,6), если с помощью второй обмотки возбуждения генератора осуществить связь по току в цепи двигателя, так как ток двигателя связан с нагрузкой на валу рабочей машины. Описанная выше (см. рис. 1.4) 1 автоматизированная система управления является системой комбинированного управления, так как в ней используется принцип регулирования по отклонению регулируемых величин на основе анализа информации об объекте управления и принцип регулирования по возмущению на основе анализа информации о состоянии среды. Каждый из трех описанных принципов управления может быть реализован по различным законам.. Законом управления назовем функциональную связь между воздействием У регулятора на регулирующий орган и значениями величин, определяющих принцип управления. Обозначим отклонение управляемой величины от заданного значения через е=Ах, а нагрузку - через q. Тогда в наиболее общем виде законы управления выразятся так: У = Р{г, г', е , / zdt, q, q, / qdt). (1.4) Выбор того или иного закона управления производится на основе анализа динамических режимов системы управления, а реализуется выбранный закон с помощью технических средств, вводимых в систему в качестве корректирующих устройств. Примером таких устройств являются пассивные RC- и /?Ь-контуры, стабилизирующие трййсформаторы и др. Действительно, если на первичную обмотку стабилизирующего трансформатора подать электрическое напря-..те. щ, пропорциональное корректируемому сигналу управления, то при определенном подборе параметров первичной и вторичной цепей на выходе трансформатора (на выходе вторичной обмотки) возникает напряжение 2. пропорциональное первой производной первичного напряжения: 2 -;,- Таким образом, если щ = е; 2 = У, то получим у = е', реализуя один из законов управления, содержащийся в выражении (1.4), а именно: управление по первой производной от отклонения управляемой величины. Укажем некоторые простейшие законы управления, вытекающие из выражения (1.4): закон управления, пропорциональный отклонению (управление по отклонению управляемой величины от заданного значения): пропорциональный отклонению с воздействием по первой производной от отклонения: y=aoe-\-aie; пропорциональный отклонению с воздействием по первой и второй производным от отклонения: у = аов-{- flie !-f Й2е ; интегральный по отклонению: у - bi J edt; о пропорциональный отклонению управляемой величины с воз- действием интеграла по нагрузке: у - йое + bi f qdt; о пропорциональный нагрузке: y=boq. Количество законов управления из бесконечного множества законов, определяемых выражением (1.4), ограничено возможностями технических и организационно-технических средств, реализующих тот или иной закон. Реальное техническое средство обычно не позволяет реализовать выбранный закон управления (например, ввести первую производную от корректируемой величины) в чистом виде без генерирования помех. При этом количество по- мех и сложность их устранения возрастают с усложнением законов управления. Остановимся подробнее на двух законах управления, которые наиболее часто встречаются в технических системах наряду с пропорциональными законами управления по отклонению управляемой величины от заданного значения и по возмущению (нагрузке). Это законы управления с введением производных и интегралов по отклонению управляемой величины и по нагрузке. При управлении по отклонению к объекту управления подводится управляющее воздействие, пропорциональное отклонению, т. е. У = ЯоЕ, (1.5) где Go - коэффициент пропорциональности между отклонением и управляющим воздействием. Вводя в закон (1.5) производную по отклонению управляемой величины, получим г/= а (е + Oie), (1-6) где а, Oi - соответствующие коэффициенты пропорциональности. Управление по закону (1.6) придает системе управления иные динамические свойства, чем управление по закону (1.5). Действительно, пусть отклонение управляемой величины от заданного значения происходит по кривой 1 (рис. 1.11, а). Задача системы управления заключается в том, чтобы возможно быстрее компенсировать отклонение или свести его к допустимому значению, определенному требованиями к процессу управления. При управлении по закону (1.5) величина е передается на вход системы через главную обратную связь с отрицательным знаком, осуществляя управляющее воздействие, направленное на уменьшение отклонения. Управляющее воздействие в этом случае пропорционально ординате кривой / в каждый момент времени. Поскольку обратная связь отрицательна, то в промежутке 0<<1, т. е. в течение времени, когда е>0, управляющее воздействие направлено на уменьшение отклонения. В силу инерционности элементов системы характер управляющего воздействия сохранится какое-то время при tti, хотя знак е уже изменился. Это вызовет нарас- 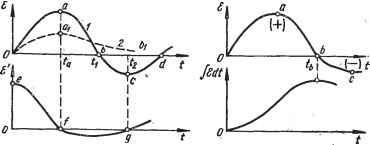 Рис. 1.11. Законы управления: а - по производной; б - по интегралу тание отклонения в обратную сторону, которое прекратится в некоторый момент времени 2>i. На участке cd при t>t2 регулятор будет действовать в сторону уменьшения е и т. д. Как видно, регулятор запаздывает в своей реакции на изменение отклонения, что приводит к колебаниям управляемой величины и к увеличению времени ее стабилизации. Показатели процесса управления существенно улучшаются при переходе к регулированию по закону (1.6). Действительно, в этом случае на участке Ос кривой / воздействие регулятора, направленное на уменьшение отклонения, возрастает, так как к управляющей составляющей, пропорциональной е, добавляется составляющая, пропорциональная е'. При этом на участке Оа обе составляющие имеют одинаковый знак, и регулятор значительно эффективнее, чем раньше, сдерживает нарастание отклонения. На участке аЪс кривой / знак составляющей управления, пропорциональной е, со-храпг'лся, а знак составляющей управления, пропорциональной г', изгйорился на обратный, так как в точке а изменился знак произ-;>.,аной функции е(0- Таким образом, составляющая, пропорциональная производной от отклонения, форсирует действие регулятора, направленное на уменьшение отклонения до тех пор, пока оно возрастает, и поддерживает значение отклонения в период его уменьшения. Это сокращает время регулирования, предотвращает колебания выходной величины. Составляющая, пропорциональная производной, проявляется тем эффективнее, чем быстрее нарастает отклонение. При этом еще до того, как отклонение накопится, создается эффективное воздействие для его уменьшения, так как управляющий эффект, обеспечиваемый этой составляющей, зависит не от величины отклонения, а от скорости его нарастания. Следует подчеркнуть, что регулирование только по производной без составляющей, пропорциональной отклонению, невозможно, так как в этом случае процесс управления будет проявляться только в динамике, прерываясь в статических режимах. Коррекция только по производной может осуществляться посредством местной обратной связи, а главная обратная связь должна содержать составляющую, пропорциональную отклонению. При введении составляющей управления, пропорциональной . интегралу от отклонения, имеем: y = a{e+bfedt). (1.7) о Вторая составляющая, пропорциональная интегралу, нарастает все время, пока отклонение положительно (рис. 1.11,6). Следовательно, на участке 0<1<1б регулирующее воздействие регулятора увеличивается даже при незначительном значении отклонения в каждый момент времени. Это повышает точность систем управления. В то же время регулирование по интегралу способствует развитию в системе колебательных процессов. Действительно, при t-ta, когда отклонение изменяет свой знак, составляющая, про- 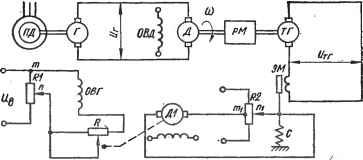 Рис. 1.12. Астатическое регулирование порциональная интегралу, выражаясь суммарной (с учетом знака) площадью под кривой е(), начинает уменьшаться, но по знаку не изменяется. Знак этой составляющей изменится лишь тогда, когда площадь, ограниченная нижней ветвью кривой e(t), превысит площадь, ограниченную верхней ее ветвью. До этого момента, начиная с момента =е, регулятор будет способствовать увеличению отрицательного Отклонения. Продолжая рассуждения, можно заметить, что составляющая управления, пропорциональная интегралу от отклонения, придает системе колебательность. Очевидно, что при использовании закона регулирования по интегралу можно создавать системы управления, в которых отклонения регулируемых величин от заданных сводятся к нулю. Такое управление, т. е. управление без отклонения управляемой величины от заданного значения (или управление без ошибки), называется астатическим. Управление же, при котором в установившихся режимах работы системы сохраняется отклонение управляемой величины от заданного значения, называется статическим., В системе автоматического регулирования, ,представленной на рис. 1.7,6, процесс регулирования статический, а сама система - статическая система автоматического регулирования. Отклонение в такой системе неизбежно, так как оно обеспечивает управляющий эффект в ней. Чтобы превратить эту систему в астатическую, ее необходимо дополнить устройствами, вводящими в закон управления составляющую, пропорциональную интегралу от отклонения. Астатическая система регулирования частоты вращения двигателя постоянного тока приведена на рис. 1.12. Обозначение и назначение элементов в этой схеме такое же, как и на рис. 1.7. Кроме того, в обратную связь по частоте вращения включены электромагнит ЭМ, якорь которого удерживается пружиной С, потенциометр RI и электродвигатель Д1, вал которого связан с ползунком реостата R в цепи ОВГ. При частоте вращения со вала рабочей машины РМ, равной заданной, система настраивается так, что напряжение, снимаемое с потенциометра R2 и подводимое к двигателю Д1, равно нулю: ползунок 1 находится против средней точки mi потенциометра R2. При возрастании или уменьшении частоты вращения со равновесие между усилием пружины С и усилием, удерживающем якорь электромагнита, нарушается. Ползунок tii поднимается вверх (при возрастании со, т. е. при возрастании тг) или опускается вниз (при уменьшении ю, т. е. при уменьшении тг). Таким образом, к двигателю Д1 будет подано напряжение того или иного знака. В результате ползунок реостата R в цепи ОВГ переместится в таком направлении, чтобы изменить напряжение г настолько, насколько требуется для восстановления заданного значения со. Как видно из рисунка, процесс регулирования будет продолжаться до тех пор, пока отклонение со от заданного значения полностью не устранится, так как только в этом случае прекратится вращение вспомогательного двигателя Д1 и перемещение ползунка реостата R. Из приведенного примера видно, что придание системе астатических свойств существенно усложнило ее, сделало более дорогой и ivienee надежной. Кроме того, как отмечено выше, в системе могут возникнуть нежелательные колебания выходной величины. n...iOMy астатическое регулирование осуществляется в тех случаях, когда необходимо полностью устранить отклонение регулируемой величины от требуемого значения, даже за счет усложнения системы и ухудшения некоторых динамических свойств системы. 1.4. РЕЛШМЫ РАБОТЫ СИСТЕМ УПРАВЛЕНИЯ Для наиболее полного анализа работы систем управления целесообразно рассматривать их в двух режимах - статическом и динамическом. Статический режим работы системы характеризуется тем, что величины, определяющие поведение системы, не изменяются во времени и система находится в равновесном состоянии. Раздел теории управления, в котором изучается равновесное состояние, называется статикой. Уместно подчеркнуть, что понятие статика системы и статическое регулирование - различные понятия. Первое определяет равновесное состояние системы, второе - процесс регулирования, при котором неизбежно отклонение регулируемой величины от заданной в равновесном состоянии. Из сказанного ясно, что понятие статика относится как к статическим, так и к астатическим системам управления. Динамический режим характеризуется тем, что величины, определяющие поведение системы, изменяются во времени, т. е. динамика рассматривает переходные процессы. Введем понятие звено системы управления, под которым будем понимать физический элемент системы, его часть или совокупность элементов, характеризуемых с точки зрения их свойств в статических и в динамических режимах. Одно из важнейших свойств звеньев - направленность их действия. Это свойство заключается в том, что изменение величины на входе звена влечет за собой изменение величины на его выходе, но не наоборот. Характер функциональной зависимости выходной величины от вход- ной определяется статическими и динамическими свойствами звеньев. Зависимость выходной величины звена от входной в равновесном состоянии называется, статической характеристикой звена. В практике анализа систем управления широко используются как аналитические, так и графические представления статических характеристик в виде функций л:вых=/(л:вх.), построенных в равновесных состояниях системы. Статические характеристики реальных звеньев всегда нелинейны, более того, в ряде случаев их невозможно описать аналитически. Примером такой характеристики является зависимость индукции от напряженности - кривая намагничивания B=f(Я).Однако при упрощенном анализе многие звенья систем управления могут быть описаны линейными зависимостями вида Л;еых = я -f ЙХвх, где auk - постоянные величины. В таких случаях широко используются уравнения звеньев в приращениях входных и выходных величин: АХвых - hAxx.- Отношение приращения выходной величины звена к приращению входной в равновесном состоянии (в статике) называется коэффициентом усиления, или коэффициентом передачи звена: = Ахвых/Алгвх. (1-8) Коэффициент передачи звена определяется конструктивными параметрами и играет важную роль в характеристике звена, определяя его статические и динамические свойства. Если статическая характеристика звена нелинейна, то коэффициент передачи k выражается как тангенс угла наклона касательной к кривой Хвых=!(Хвх) и будет различным для разных значений входной и выходной величин (рис. 1.13). При рассмотрении астатического регулирования было показано, что при подаче на вход астатического звена приращения входной величины выходная величина этого звена неограниченно растет. Действительно, если на рис. 1.12 в равновесном состоянии системы отключить обмотку электромагнита ЭМ от тахогенератора и дать приращение напряжения на входе этой обмотки, то угол поворота вала двигателя Д1 будет непрерывно возрастать. Из ска- 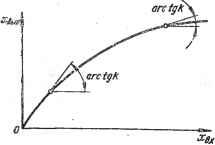 -> Рис. 1.13. Статическая характеристика нелинейного звена Рис. 1.14. Замкнутая система одноконтурная данного видно, что выражение (1.8) не годится для определения понятия коэффициента передачи астатического звена. Коэффициентом передачи (усиления) астатического звена называется отношение скорости изменения выходной величины к приращению входной величины в установившемся состоянии: АХвых/М = Ахв. В ряде случаев установившегося состояния не имеет не только выходная величина астатического звена, но и ее первая, вторая и т. д. производные. В таких случаях статические характеристики астатических звеньев строятся как зависимости от входной величины второй, третьей и т. д. производных выходной величины. Сами астатические звенья в этих случаях называются звеньями с аста-тизмом второго, третьего и т. д. порядка. Статические характеристики отдельных звеньев либо задаются как характеристики физических элементов, либо могут быть легко пг- ;1оены по паспортным данным элементов системы. Однако для анализа свойств системы управления необходимо располагать не только статическими характеристиками отдельных звеньев, но и статической характеристикой всей системы. В теории автоматического управления разработаны различные методы и приемы построения статических характеристик САУ на основе статических характеристик отдельных звеньев, образующих систему. При этом под статической характеристикой разомкнутой системы понимается зависимость выходной величины от входной в равновесном состоянии, а под статической характеристикой замкнутой системы понимается зависимость регулируемой величины от возмущающего воздействия в равновесном состоянии. В большинстве случаев анализа САУ представляют интерес режимы работы замкнутой, а не разомкнутой системы. В связи с этим рассмотрим общий метод построения статической характеристики замкнутой системы. Для реализации метода необходимо замкнутую систему представить как одноконтурную (рис. 1.14), состоящую из двух частей: fu объединяющую все звенья системы, .находящиеся между регулируемой величиной Хр и возмущающим воздействием F, и /г, объединяющую все звенья системы, находящиеся между возмущающим воздействием и регулируемой величиной. При этом принимается во внимание отмеченное ранее свойство направленности звеньев САУ. Величина Хо на рис. 1.14 означает заданное значение регулируемой величины. Зависимости X2=fi(x,) и Xp=f2{X3) строятся на основании статических характеристик звеньев, образующих части системы fi и /г соответственно. Задача сводится к построению зависимости Хр = ~f{P)-статической характеристики замкнутой системы. Запишем уравнения статики рассматриваемой системы: = fzixz); Хз = X2 - F; Х2 = fi (л:,); xi = Хо - Хр. Исключая из этих уравнений промежуточные величины, можно найти зависимость Xp=f{Fy. При этом в случае линейных систем нетрудно получить аналитическую зависимость статической характеристики Xp=f{F). Действительно, для линейной системы имеем: = кгХз; = - F; Х2 = kXi, Xi = Xq - Хр, где ki и 2 - коэффициенты передачи частей системы fi и /г соответственно. Исключая из написанных уравнений промежуточные переменные, получим уравнение статической характеристики рассматриваемой системы: p=--o-F = f(F), (1.9) где k=kik2 - коэффициент передачи разомкнутой системы. Анализ выражения (1.9) показывает, что точность регулирования повышается с увеличением коэффициента передачи разомкнутой системы. Действительно, чем выше значение k, тем меньше значение % отличается от Xq. Следует, однако, подчеркнуть, что увеличение k с целью повышения точности системы должно происходить за счет повышения коэффициента а не Аг, так как только в этом случае в выражении (1.9) уменьшается влияние второго слагаемого, определяющего влияние возмущающего воздействия на значение регулируемой величины. Наконец, чрезмерное увеличение коэффициента передачи разомкнутой системы может привести к нарушению устойчивости системы в динамических режимах работы, что будет рассмотрено ниже. Определение точности регулирования является основной задачей анализа статических режимов САУ. Точность САУ определяется статической ошибкой регулирования А, под которой понимается разность между заданным значением регулируемой величины Xq и ее действительным значением х в установившемся состоянии: А = Хо-X. Отношение статической ошибки А к номинальному значению регулируемой величины дгном называется статизмом регулирования: 6 = A/Xhom. Из рассмотрения процесса управления в замкнутой системе видно, что статическая ошибка в ней будет меньше, чем в разомкнутой системе. Действительно, уменьшение выходной величины в замкнутой системе повлечет за собой увеличение управляющего воздействия, направленного на восстановление выходной величины, т. е. на уменьшение статической ошибки. Не останавливаясь на более подробном обосновании, приведем соотношение между ошибкой регулирования в разомкнутой системе Ао и ошибкой в замкнутой системе А: A = Ao/(fe+:i), (1.10) где k - коэффициент усиления разомкнутой системы. Как видно из изложенного, анализ статических режимов САУ базируется на анализе алгебраических уравнений статики и сводится, в конечном счете, к определению статической ошибки. Не являясь сам по себе сложным, статический расчет САУ играет очень важную роль. Если параметры системы, определяемые в результате статического расчета, будут выбраны неверно, то после-
|
 Как выбрать диван  История мебели  Стили кухонной мебели  Публикации  Инверторы  Приемники |






