
|
|
|
Главная » Микропроцессорное управление 1 ... 7 8 9 10 11 12 13 ... 27 Программируемые логические контроллеры (ПЛК) работают в циклическом режиме, последовательно выполняя операции ввода данных о состоянии объекта управления, обработки данных и формирования сигналов управления, выдачи сигналов управления на исполнительные устройства. Выходные сигналы управления формируются на основе значений логических функций, вычисляемых по программе, хранящейся в ПЗУ. Вычисленные значения логических функций хранятся в определенной области ОЗУ. После окончания процесса вычисления (обработки) происходит обмен данными между ОЗУ и выходными и входными регистрами УСО. Процессы ввода - вывода, обмена и обработки данных периодически повторяются. Однократное исполнение контроллером всей программы называют циклом полного опроса памяти, а время, в течение которого этот цикл совершается,- временем цикла опроса. По степени сложности ПЛК разделяются на три класса. Программируемые логические контроллеры первого класса работают по фиксированной программе. Они имеют небольшое число (5 ...20) входов и выходов и ЗУ малой емкости. Рабочая программа такого ПЛК обычно зашита в БИС РПЗУ и не может быть изменена оператором технологической установки. Если нужно изменить алгоритм управления, то БИС РПЗУ отключают от специального контактирующего устройства ПЛК и перепрограммируют с помощью автономного комплекса, программное обеспечение которого содержит язык программирования пользователя, например язык описания релейно-контактных схем на основе булевых функций. Программируемым логическим контроллером такого типа является микроконтроллер МК Электроника CMC 12101.01 -представитель нового поколения микроЭВМ Электроника С5 . Микроконтроллер содержит на одной плате микропроцессор, ОЗУ и ПЗУ с ограниченным объемом, средства связи с источниками и приемниками информации, средства объединения МК в единую систему (системный канал СК). На рис. 2.32 показана структурная схема ПЛК на базе МК Электроника CMC 12101.01 . В качестве СК использован канал ИРПС и специальный последовательный канал СПК. Программируемые логические контроллеры второго класса имеют до 150 входов и выходов, ЗУ емкостью до 32 Кбайт, внешний язык задания алгоритмов управления и средства загрузки программ в ЗУ. К программируемым логическим контроллерам этого класса относится контроллер Электроника К1-20 , который обеспечивает логическое управление объектом по 48 линиям связи, а также программируемые прием и выдачу информации в последовательном коде по одному каналу. Четыре входа и выхода контроллера имеют гальваническую развязку. Логические уровни всех входных и выходных сигналов контроллера соответствуют уровням ТТЛ. Контроллер содержит в 94 своем составе микропроцессор КР580ИК80. Емкость ОЗУ составляет 1 Кбайт, РПЗУ- 12К байт, ППЗУ -4К байт. Контроллер не содержит УСО, поэтому пользователю необходимо предусматривать подключение этих устройств. Программируемый логический контроллер Электроника К1-20 используется для управления специальным технологическим оборудованием микроэлектроники типа сборочных автоматов, конвейеров и т. п. Программируемые логические контроллеры третьего класса служат для управления сложными объектами, имеющими до 1000 дискретных входов и выходов. Эти ПЛК сопрягаются с ЭВМ верхнего уровня, имеют развитый язык задания алгоритмов управления, периферийные устройства (дисплей, печатающее устройство, накопитель на гибких магнитных дисках и др.). Кроме управления ПЛК выполняют вычислительные Устройство отображения информации Минроконтроллер Электроника CMC 1Z101.01 СПК Оптронная раздязна Дискретные Дискретные Входы Выходы Рис. 2.32. Структурная схема ПЛК на базе микроконтроллера Электроника CMC 12101.01 функции и выдают собранную информацию на ЭВМ верхнего уровня. Примерами таких устройств являются контроллеры типа Модикон 584 фирмы GOULD (США), FPC фирмы FESTO и др. Отечественными устройствами такого типа являются устройства числового программного управления УЧПУ Электроника 80-31 , которые состоят из двух типов микроЭВМ: управляющей для ввода, обработки, отображения, вывода информации и исполнительной для управления исполнительными устройствами оборудования. Универсальная структура микроЭВМ позволяет включать любой набор модулей- вычислитель, устройство отображения, запоминающее устройство, контроллер связи с электроавтоматикой и другими процессорными системами по телеграфным каналам. Модульный принцип УЧПУ позволяет создавать устройства с различными функциональными возможностями. Один из вариантов исполнения УЧПУ Электроника 80-31 обеспечивает управление объектом с числом дискретных исполнительных механизмов до 100 и дискретных датчиков до 180. Программа управления позволяет задавать цикл функционирования в виде релейно-контактных схем. Управление объектом выполняется циклически. В течение одного цикла (не более 20 мс) происходит опрос входных сигналов, их логическая обработка и выдача управляющих воздействий. В состав ПЛК входят универсальный вычислитель, блок логических операций, до трех плат электроавтоматики и блок питания. Блок логических операций производит логическую обработку входной битовой информации по программе, записан- ной в ППЗУ, которая изменяется в зависимости от типа объекта управления. Платы электроавтоматики предназначены для связи с электрооборудованием объекта управления. К одной плате можно подключить 64 входа и 32 выхода. Подготовка и отладка программ управления электроавтоматикой осуществляются средствами системы подготовки алгоритмов, построенными на базе диалогового вычислительного комплекса ДВК-2М, дополнительно укомплектованного контроллером телеграфных каналов на шесть направлений и программатором ППЗУ. На дисплее системы можно просматривать и изменять состояние любого бита в программе, а также просматривать состояние входных и выходных сигналов любой платы электроавтоматики. Изменяя состояния входных или промежуточных сигналов, можно имитировать различные ситуации на объекте управления и следить за его поведением. Отлаженный алгоритм записывается в ППЗУ. Программируемые регулирующие контроллеры (ПРК). Для реализации более сложных алгоритмов, а также для замены групп обычных ПИ- и ПИД-регуляторов, используемых в системах управления параметрами технологических процессов, служит ПРК. В состав ПРК помимо процессора входят многоканальные АЦП и ЦАП, ПЗУ, в котором записаны программы, реализующие различные алгоритмы регулирования. С панели оператора осуществляется оперативное управление, изменяются значения сигналов задания и ручного управления, параметры алгоритмов (законов) управления. За рубежом ПРК, обеспечивающие прямое цифровое регулирование, используются достаточно широко. На их основе выпускаются различного типа микропроцессорные системы, такие как ТДС-2000 фирмы Honeywell и др. Отечественным программируемым регулирующим контроллером является Ремиконт Р-100 . Структурная схема Ремиконт Р-100 , представленная на рис. 2.33, содержит процессор У, ПЗУ 2, ОЗУ 3, панель оператора 4 и УСО, включающее мультиплексор 6, АЦП 5, ЦАП 7, дискретно-цифровые 8 и цифродискретные преобразователи 9. В состав Ремиконт Р-100 входят также гальванические развязки J0, Ih 12, 13, блок сопряжения с другими комплексами 14. Мультиплексор и АЦП осуществляют прием и преобразование 16 аналоговых сигна)юв. Кроме того, предусмотрена установка дополнительных мультиплексоров и АЦП, обеспечивающих в этом случае прием 64 аналоговых сигналов. Центральный процессор в Ремиконт Р-100 реализован на базе микропроцессора КР580ИК80. Постоянное ЗУ представляет собой полупроводниковую память, в которой хранятся функциональные программы. Программируется ПЗУ на заводе-изготовителе. Библиотека программ Ремиконт Р-100 компонуется на базе стандартных алгоритмов: аналогового ПИД-регулирования; импульсного ПИД-регулирования; динамического преобразования (интег-96 Минропроцессорный Вычислитель С г Магистраль 7 %- Межкомллепсная магистраль EH 3Id IH ЕЗ Входы Bbixoffbi Входы УСО йналогобые Дискретные Рис. 2.33. Структурная схема программируемого регулирующего контроллера Ремиконт Р-ЮО рирования, дифференцирования и т. д.); статического преобразования (суммирования, умножения и т. п.); нелинейного преобразования (масккрования, переключения и т. п.); управляющей логики (операций сложения, умножения, выдержки времени и т. п.). Реализация этих алгоритмов позволяет строить системы автоматического управления технологическими процессами практически любой сложности. Оперативная память данных разделена на две области. Первая представляет собой ЗУ прямой выборки и используется для временного хранения промежуточных результатов расчета режимов работы и коэффициентов настройки, а вторая предназначена для хранения перепрограммируемых параметров Ремиконт Р-100 . С панели оператора осуществляется оперативное управление, изменяются сигналы задания автоматического и ручного управления, контролируются значения технологических параметров, устанавливается требуемая конфигурация регулирующего контура, выбираются алгоритмы управления и параметры статической и динамической настройки Ремиконт Р-100 . Информация оператору представляется на панели при помощи цифровых индикаторов и светодиодов. Потребитель может выбирать (программировать) требуемую для данного объекта систему автоматического управления и проверять правильность ее функционирования. При подобном подходе используется наиболее ценное свойство микропроцессорной техники - программируемость-и резко упрощаются наладка и эксплуатация системы управления. Программируемые комбинированные контроллеры. В отечественной промышленности были разработаны и получили распростра- нение контроллеры, реализующие одновременно функции регулирования и логического (дискретного) управления, т. е. контроллеры смешанного типа. Первым отечественным промышленным контроллером смешанного типа является программатор 15ИПП-16-005 Орион-1 , вьтускаемый серийно с 1982 г. Технические характеристики программатора Орион-1 : Алгоритмы управления............. время-команда время - параметр регулирование по ПИД-алгоритму Число программируемых временных интервалов ... 99 Длительность временного интервала мин: минимальная ....... . 0,01 максимальная..... ....... . 999 Погрешность отсчета времени, %.........0,5 Число дискретных входных сигналов.........48 Напряжение входных сигналов. В: в состоянии 1 . .........24+4,8 в состоянии О . .......0...3 Число дискретных выходных команд........48 Параметры коммутируемой электрической цепи: напряжение, В................до 30 ток, А...................до 0,7 Число входных и выходных аналоговых сигналов, .... 4 Параметры сигналов по аналоговым каналам: Входное и выходное напряжение, В........0...10 суммарная абсолютная погрешность, мВ, не более . , .+15 Последовательный канал связи, тип . . токовая петля Принцип работы программатора Орион-1 по алгоритму время - команда и время - параметр предусматривает временную последовательную организацию цикла управления, при котором весь технологический процесс разбивается на определенное число временных интервалов, в начале которых программатор выдает запрограммированные команды (рис. 2.34). Программатор позволяет запрограммировать по каждому аналоговому каналу два режима работы: первый - выдачу аналоговых сигналов разного уровня на временных интервалах, при этом аналоговые сигналы могут быть выданы скачком в начале интервала или по линейно изменяющемуся закону с нарастанием или уменьшением; второй - регулирование по ПИД-закону. Переход с одного временного интервала на другой может происходить в режиме или безусловного перехода, или перехода по условию. Выходные . aenu дискретного упрадления 3 - - t, t, Выходные сигналы аналвгодиго управления, В IIИД канал 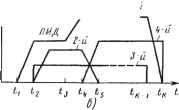 Рис. 2.34. Циклограмма алгоритмов: о время команда ; й время параметр с регулированием по ПИД-закону но 1-му каналу Безусловный переход предполагает переход на следующий интервал по истечении времени текущего интервалу. Режим условного перехода обеспечивает переход программы на следующий или другие временные интервалы при некоторых условиях. В качестве условий перехода используются различные программируемые наборы входных сигналов. На рис. 2.35 представлена структурная схема программатора. Б качестве управляющего устройства в Орион-1 используют микроэвм Электроника-бОМ 15ВМ-16-012. Шины ЭВМ соединяются с щинами УСО устройствами согласования УС. Обмен данными между центральным процессором и модулями УСО осуществляется через канал ЭВМ, при этом используются циклы Ввод , Вывод и режим Прерывание . В состав модулей УСО Орион-1 входят: модули ОЗУ (энергонезависимое) и ПЗУ, два модуля приема и выдачи (обмена) МинроЭВМ , Электроника -BDM Панель упраВления ОЗУ ПЗУ Л
Магистраль МПИ MBfli мвйг мпд мор! i-г 1-г тттт ftft mfi I г д It iZ4 IZii г^-чв is-ts / \ : / Диалоговые сигналь/ Диснретные сигналы Рис. 2.35. Структурная схема программируемого контроллера Орион-1  Вам Время Канал Параметр I I I I I I I I I Двпусн каналов t 2 ] i е Ulb,f © © © © > Q ©©©© = %©©©©< © © Прогр. I © Сеть © © ©©© ©©© П IS 19 © © Останов © © Конец дынод © © © Сбои ТГрирЩёи © © © © ©©© 11 IS 999 ©© © JO j; J? 999 ©© © 4tf *7 4tf
© © © © Рис. 2.36. Панель управления ПК Орион-1 дискретных сигналов с оптронной развязкой - модули обменные оптронные (МОО), модуль приема (МПА), модули выдачи (МВА) аналоговых сигналов, панель управления (рис. 2.36). Структурные схемы модулей МОО, МПА, МВА и их функционирование аналогичны схемам Орион-3 . Программатор Орион-1 работает в режимах Ручной , Программирование и Автоматический , которые устанавливаются ключом на панели управления (см. рис. 2.36). В режиме Ручной с помощью переключателей, находящихся под фальшпанелью, возможна коммутация выходных цепей с 1-й по 48-ю. В режиме Программирование осуществляется программирование конкретного технологического процесса с использованием клавиатуры и органов управления, расположенных на лицевой панели. Программирование временных интервалов производится с помощью кнопок Инт. , Время и цифровой клавиатуры. Номера временных интервалов отображаются на соответствующих индикаторах. При этом на индикаторах Время индицируется длительность программируемого временного интервала. В рабочем режиме ( Автом. ) на индикаторах может указываться время, оставшееся до конца текущего интервала. Программирование коммутации дискретных выходов (с 1-го по 48-й) на соответствующем временном интервале производится с 100 помощью переключателей 1 ... 48 , Переход , Условие , Останов , Конец . Операция программирования на каждом интервале завершается нажатием кнопки Запись . Кнопки Задан. , П , И , Д обеспечивают возможность программирования аналоговых выходных сетналов, значения которых отображаются на цифровых индикаторах. Если программируется только выдача значений по аналоговым выходам, то переключатель Ug-(7вых находится в положении и^ых- Если программируется режим регулирования, то переключатель ставится в положение Ux- Номер канала управления при этом устанавливается с помощью переключателя Канал . Программатор позволяет, прежде чем перейти на автоматический режим, просмотреть записанную программу, что выполняется с помощью кнопок Чтен , и Шаг и соответствующих индикаторов. Если ключ находится в положении Автоном. , управление программатором происходит от кнопок Пуск , Стоп , Сброс или от сигналов, функционально аналогичных этим и поступающих на внешний соединитель программатора, что позволяет вынести управление программатором на лицевую панель технологического оборудования. В' этом режиме работы допускается дистанционное управление программатором по псследоБательному каналу (ИРПС) при нажатии кнопки Диет . Кнопка Стоп прекращает движение программы, однако при этом сохраняются включенными дискретные, и аналоговые выходы, запрограммированные на текущем интервале времени. Для перевода программы в исходное состояние необходимо нажать после кнопки Стоп кнопку Сброс . Кнопка Пуск запускает или возобновляет движение программы в режиме Автом. . Орион-1 позволяет вывести программу управления процессом на перфоленту для последующего использования и ввести программу с перфолент, что производится с помощью соответствующих кнопок Вывод и Ввод . Программатор производит диагностику исправности устройств ОЗУ, ПЗУ, модулей МОО и МПА, отображая результат диагностики на соответствующих световых индикаторах. 2.5. ИЗМЕРИТЕЛЬНЫЕ ПРЕОБРАЗОВАТЕЛИ В технологическом оборудовании микроэлектроники необходимо контролировать большое количество различных параметров. В любой автоматической системе управления можно выделить объект управления (ОУ) с первичными преобразователями (датчиками Д), вторичными измерительными преобразователями (ИП) и исполнительными устройствами (ИУ), устройство управления
Zlx) АЦП УСО И(х) N(x} Рис 2.37 Упрощенная структурная схема автоматической системы управления (УУ) И устройство согласования с объектом (УСО) (рис. 2.37), включающее ЦАП. В функции датчиков входят получение информации о состоянии объекта управления и при необходимости преобразование неэлектрического параметра л' в электрический сигнал Z(a), как правило, аналогового характера. В МПСУ электрический сигнал Z(.x), поступая в УСО, преобразуется АЦП в цифровой код, а затем поступает в УУ, где сравнивается с заданным значением параметра. При этом вырабатывается команда для ИУ, которая, поступая в УСО, преобразуется ЦАП из цифровой в аналоговую форму. Затем команда подается на ИУ, которое приближает параметры объекта управления к заданным. По виду входной величины различают измерительные преобразователи перемещений, скорости, температуры, давления, влажности, расхода газов и т. д. Измерительные преобразователи характеризуются видом входной величины, диапазоном измерений, чувствительностью, погрешностью преобразования, быстродействием, уравнением преобразования, видом выходной величины, принципом действия и т. д. Одной из главных характеристик измерительных преобразователей является погрешность преобразования, которая состоит из основной погрешности, свойственной преобразователю при работе в нормальных условиях, и дополнительной, возникающей при отклонении внешних условий от нормальных. Погрешность в зависимости от текущего значения входной величины обычно представляют в виде двух частей: аддитивной, т. е. не зависящей от значений входной величины, и мультипликативной, пропорциональной текущему значению входной величины. В технологическом оборудовании микроэлектроники при контроле температуры до 1600° С погрешность измерения, как правило, не должна превышать долей градуса, перемещение в диапазоне от 1 до 200 мм-0,2...0,5 мкм, давление от 10 ...10 Па (при нанесении пленок) до 100 кПа (при эпитаксии)- 10~...10~ Па, расход газов в диапазоне от 0,1...1 л/ч (для плазмохимического оборудования) с точностью измерения (1...3)% до 25 м^/ч (расход водорода при эпитаксии) с точностью до 5...10% и т. д. Кроме того, измерительные преобразователи применяются также для контроля чистоты технологических газов и жидкостей (табл. 2.6) и параметров технологического микроклимата (табл. 2.7). 102 Таблица 2.6. Контроль чистоты технологических газов н жидкостей Анализируемый газ (жидкость) Измеряемая нримесь (параметр) Пределы измерения Допустимая погрешность измерения, % Азот, аргон, водород, кислород, воздух Азот, аргон Азот, аргон Азот, аргон, кислород, водород Азот, аргон, кислород, водород, воздух Деионизованная вода Пары воды Кислород Водород Диоксий углерода Аэрозоли Удельное сопротивление (0...5) 10~*% (0...20)10-% (0...1000)10-% 10-% 10 % 10 % 5 10-об. % Минимальный размер частиц 0,5 мкм 3...30 мОм-см ±10 + 6 +(4...6) ±10 ±6 ±10 +(5...10) + 5 Рассмотрим применяемые в технологическом оборудовании преобразователи. Первичные преобразователи температуры. Диапазон используемых температур в современном производстве ИМС составляет - 270...-Ь1600° С и не перекрывается ни одним из известных первичных измерительных преобразователей температуры. Весь этот диапазон обычно перекрывают набором из трех групп первичных измерительных преобразователей: 1) в диапазоне - 50...-I-150° С используют полупроводниковые измерительные преобразователи; Таблица 2.7 Контроль параметров технологического микроклимата
|
 Как выбрать диван  История мебели  Стили кухонной мебели  Публикации  Инверторы  Приемники |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||






